Annihilation of calcium oscillations with PLC activation inhibition: Difference between revisions
mNo edit summary |
|||
| Line 31: | Line 31: | ||
== Reference Solutions == | == Reference Solutions == | ||
A solution for this problem is described in <bibref>Lebiedz2005</bibref>. | A solution for this problem is described in <bibref>Lebiedz2005</bibref>. A local minimum that is actually slightly worse than the solution provided for only one control, is shown in the next plots. | ||
[[Image:calcium2Controls.png]] [[Image:calcium2States.png]] | |||
<gallery caption="Reference solution plots" widths="180px" heights="140px" perrow="2"> | |||
Image:calcium2Controls.png| Optimal stimuli determined by mixed-integer optimal control. | |||
Image:calcium2States.png| Corresponding differential states. | |||
</gallery> | |||
== Variants == | == Variants == | ||
Revision as of 21:26, 12 November 2008
| Annihilation of calcium oscillations with PLC activation inhibition | |
|---|---|
| State dimension: | 1 |
| Differential states: | 4 |
| Discrete control functions: | 2 |
| Interior point equalities: | 4 |
This control problem is closely related to Annihilation of calcium oscillations. The only difference is an additional control function, the inhibition of PLC activation. We state only the differences in this article.
Mathematical formulation
For almost everywhere the mixed-integer optimal control problem is given by
Note that we write instead of and have an additional control function . The regularization parameters are set to .
Reference Solutions
A solution for this problem is described in <bibref>Lebiedz2005</bibref>. A local minimum that is actually slightly worse than the solution provided for only one control, is shown in the next plots.


- Reference solution plots
-
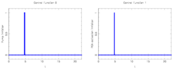 Optimal stimuli determined by mixed-integer optimal control.
Optimal stimuli determined by mixed-integer optimal control. -
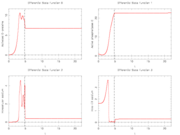 Corresponding differential states.
Corresponding differential states.
Variants
References
<bibreferences/>