Difference between revisions of "Fuller's initial value problem"
ClemensZeile (Talk | contribs) (Created page with "{{Dimensions |nd = 1 |nx = 2 |nw = 1 |nre = 2 }}<!-- Do not insert line break here or Dimensions Box moves up in the layout... -->This site describ...") |
ClemensZeile (Talk | contribs) (→Parameters) |
||
| (4 intermediate revisions by the same user not shown) | |||
| Line 15: | Line 15: | ||
<math> | <math> | ||
\begin{array}{llcl} | \begin{array}{llcl} | ||
| − | \displaystyle \min_{x, w} & \int_{ | + | \displaystyle \min_{x, w} & \int_{t_0}^{t_f} x_0^2 \; &\mathrm{d} t& + (x(t_f)-x_T)^2 \\[1.5ex] |
\mbox{s.t.} & \dot{x}_0 & = & x_1, \\ | \mbox{s.t.} & \dot{x}_0 & = & x_1, \\ | ||
& \dot{x}_1 & = & 1 - 2 \; w, \\[1.5ex] | & \dot{x}_1 & = & 1 - 2 \; w, \\[1.5ex] | ||
| Line 23: | Line 23: | ||
</math> | </math> | ||
</p> | </p> | ||
| − | |||
== Parameters == | == Parameters == | ||
| − | We use <math>x_S = x_T = (0.01, 0)^T</math>. | + | We use <math>x_S = x_T = (0.01, 0)^T</math> and <math>(t_0,t_f) = (0,1)</math>. |
| − | + | ||
== Reference Solutions == | == Reference Solutions == | ||
| Line 34: | Line 32: | ||
If the problem is relaxed, i.e., we demand that <math>w(t)</math> be in the continuous interval <math>[0, 1]</math> instead of the binary choice <math>\{0,1\}</math>, the optimal solution can be determined by means of direct optimal control. | If the problem is relaxed, i.e., we demand that <math>w(t)</math> be in the continuous interval <math>[0, 1]</math> instead of the binary choice <math>\{0,1\}</math>, the optimal solution can be determined by means of direct optimal control. | ||
| − | The optimal objective value of the relaxed problem with <math> n_t= | + | The optimal objective value of the relaxed problem with <math> n_t=6000, \, n_u=150 </math> is <math>1.45412214e-05</math>. The objective value of the binary controls obtained by Combinatorial Integral Approimation (CIA) is <math>2.40273813e-05</math>. |
| − | <gallery caption="Reference solution plots" widths="180px" heights="140px" perrow=" | + | <gallery caption="Reference solution plots" widths="180px" heights="140px" perrow="4"> |
| − | Image: | + | Image:FullerRelaxed 6000 40 1.png| Optimal relaxed states determined by an direct approach with ampl_mintoc (Radau collocation) and <math>n_t=6000, \, n_u=150</math>. |
| − | Image: | + | Image:FullerRelaxed 6000 40 2.png| Optimal relaxed controls. |
| + | Image:FullerCIA 6000 40 1.png| Optimal differential states trajectories of binary controls determined by an direct approach (Radau collocation) with ampl_mintoc and <math>n_t=6000, \, n_u=150</math>. The relaxed controls were approximated by Combinatorial Integral Approximation. | ||
| + | Image:FullerCIA 6000 40 2.png| Optimal binary controls. | ||
</gallery> | </gallery> | ||
| Line 54: | Line 54: | ||
[[Category:Chattering]] | [[Category:Chattering]] | ||
[[Category:Sensitivity-seeking arcs]] | [[Category:Sensitivity-seeking arcs]] | ||
| − | + | ||
Latest revision as of 23:26, 8 January 2018
| Fuller's initial value problem | |
|---|---|
| State dimension: | 1 |
| Differential states: | 2 |
| Discrete control functions: | 1 |
| Interior point equalities: | 2 |
This site describes a Fuller's problem variant with no terminal constraints and additional Mayer term for penalizing deviation from given reference values.
Mathematical formulation
For ![t \in [t_0, t_f]](https://mintoc.de/images/math/5/5/8/55823791d9100bcb5461801aff4f6edd.png) almost everywhere the mixed-integer optimal control problem is given by
almost everywhere the mixed-integer optimal control problem is given by
![\begin{array}{llcl}
\displaystyle \min_{x, w} & \int_{t_0}^{t_f} x_0^2 \; &\mathrm{d} t& + (x(t_f)-x_T)^2 \\[1.5ex]
\mbox{s.t.} & \dot{x}_0 & = & x_1, \\
& \dot{x}_1 & = & 1 - 2 \; w, \\[1.5ex]
& x(0) &=& x_S, \\
& w(t) &\in& \{0, 1\}.
\end{array}](https://mintoc.de/images/math/6/5/1/6518054ccce789f577f4c0291cb08d6c.png)
Parameters
We use  and
and  .
.
Reference Solutions
If the problem is relaxed, i.e., we demand that  be in the continuous interval
be in the continuous interval ![[0, 1]](https://mintoc.de/images/math/c/c/f/ccfcd347d0bf65dc77afe01a3306a96b.png) instead of the binary choice
instead of the binary choice  , the optimal solution can be determined by means of direct optimal control.
, the optimal solution can be determined by means of direct optimal control.
The optimal objective value of the relaxed problem with  is
is  . The objective value of the binary controls obtained by Combinatorial Integral Approimation (CIA) is
. The objective value of the binary controls obtained by Combinatorial Integral Approimation (CIA) is  .
.
- Reference solution plots
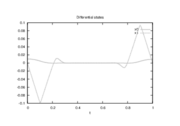
Optimal relaxed states determined by an direct approach with ampl_mintoc (Radau collocation) and
.
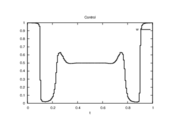
Optimal relaxed controls.
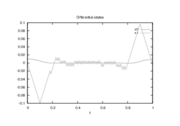
Optimal differential states trajectories of binary controls determined by an direct approach (Radau collocation) with ampl_mintoc and
. The relaxed controls were approximated by Combinatorial Integral Approximation.
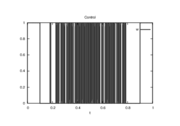
Optimal binary controls.



