Bioreactor
The bioreactor example is an easy bioreactor with an substrate that is converted to a product by the biomass in the reactor. It has three states and a control that is describing the feed concentration of substrate. It is taken from the examples folder of the ACADO toolkit described in:
Houska, Boris, Hans Joachim Ferreau, and Moritz Diehl. "ACADO toolkit—An open‐source framework for automatic control and dynamic optimization." Optimal Control Applications and Methods 32.3 (2011): 298-312.
Originally the problem seems to be motivated by:
VERSYCK, KARINA J., and JAN F. VAN IMPE. "Feed rate optimization for fed-batch bioreactors: From optimal process performance to optimal parameter estimation." Chemical Engineering Communications 172.1 (1999): 107-124.
Model Formulation
The dynamic model is an ODE model:
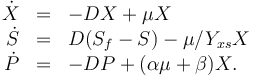
The three states describe the concentration of the biomass ( ), the substrate (
), the substrate ( ), and the product (
), and the product ( ) in the reactor. In steady state the feed and outlet are equal and dilute all three concentrations with a ratio
) in the reactor. In steady state the feed and outlet are equal and dilute all three concentrations with a ratio  . The biomass grows with a rate
. The biomass grows with a rate
 , while it eats up the substrate with the rate
, while it eats up the substrate with the rate  and produces product at a rate
and produces product at a rate  . The rate is given by:
. The rate is given by:

The fixed parameters (constants) of the model are as follows.
| Name | Symbol | Value | Unit |
| Dilution |
|
0.15 | [-] |
| Rate coefficient | 
|
22 | [-] |
| Rate coefficient | 
|
1.2 | [-] |
| Rate coefficient | 
|
50 | [-] |
| Substrate to Biomass rate | 
|
0.4 | [-] |
| Linear slope | 
|
2.2 | [-] |
| Linear intercept | 
|
0.2 | [-] |
| Maximal growth rate | 
|
0.48 | [-] |
Optimal Control Problem
Writing shortly for the states in vector notation  the OCP reads:
the OCP reads:
![\begin{array}{cl}
\displaystyle \min_{x,S_f} & J(x,S_f)\\[1.5ex]
\mbox{s.t.} & \dot{x} = f(x,S_f), \forall \, t \in [0,48]\\
& x(0) = [6.5,12,22]^T \\
& x \in \R^3,\,S_f \in [28.7,40].
\end{array}](https://mintoc.de/images/math/9/1/5/9151e5a1c4c3e5dd8edd6056bde9a8be.png)
This is the most general formulation, where the initial value, parameters, and inputs are free. The states and inputs are vectors (or matrices) of functions while the parameters are just a vector of variables. If the initial (or final) state is fixed, one just adds a constraint  and specifies the value(s) of
and specifies the value(s) of  in a list or table.
If the parameters are fixed, then one just removes them from the list of optimization variables and states their values in a list (same for point conditions inside of the interval
in a list or table.
If the parameters are fixed, then one just removes them from the list of optimization variables and states their values in a list (same for point conditions inside of the interval  ). If the OCP is a parameter estimation problem without inputs,
the inputs just dont appear in the problem above at all, neither as optimization variable nor as part of the constraints. In contrast if they are just fixed this is done by the equality constraints. In this setup the above problem is very general and by
stating the different objective functions and constraint functions one can cover a wide range of OCPs.
). If the OCP is a parameter estimation problem without inputs,
the inputs just dont appear in the problem above at all, neither as optimization variable nor as part of the constraints. In contrast if they are just fixed this is done by the equality constraints. In this setup the above problem is very general and by
stating the different objective functions and constraint functions one can cover a wide range of OCPs.