Cushioned Oscillation
| Cushioned Oscillation | |
|---|---|
| State dimension: | 1 |
| Differential states: | 2 |
| Continuous control functions: | 1 |
| Path constraints: | 2 |
| Interior point equalities: | 4 |
The Cushioned Oscillation is a simplified model of time optimal "stopping" of an oscillating object attached to a spring by applying a control and moving it back into the relaxed position and zero velocity.
Contents
[hide]Model formulation
An object with mass  is attached to a spring with stiffness constant
is attached to a spring with stiffness constant  .
.
If the resetting spring force is proportional to the deviation  , an oscillation, induced by an external force
, an oscillation, induced by an external force  , satisfies:
, satisfies:
 (which is equivalent to
(which is equivalent to  )
)
where  denotes the deviation to the relaxed position and
denotes the deviation to the relaxed position and  the velocity of the oscillating object.
the velocity of the oscillating object.
Through external force, the object has been put into an initial state :

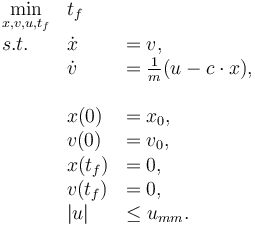
The goal is to reset position and velocity of the object as fast as possible, meaning:
 ,
,
with the objective function:

Optimal Control Problem Formulation
The above results in the following OCP
Parameters and Reference Solution
The following parameters were used, to create the reference solution below, with an almost optimal final time  :
:





Reference Solution
- Reference solution plots

States and Controls

The OCP was solved within MATLAB R2015b, using the TOMLAB Optimization Package. PROPT reformulates such problems with the direct collocation approach (n=80 collocation points) and automatically finds a suiting solver included in the TOMLAB Optimization Package (in this case, SNOPT was used).
Source Code
- A MATLAB script using PROPT can be found in: Cushioned Oscillation (PROPT)