Difference between revisions of "Egerstedt standard problem"
ClemensZeile (Talk | contribs) |
ClemensZeile (Talk | contribs) |
||
| Line 38: | Line 38: | ||
<gallery caption="Reference solution plots" widths="180px" heights="140px" perrow="2"> | <gallery caption="Reference solution plots" widths="180px" heights="140px" perrow="2"> | ||
| − | Image: | + | Image:EgerstedtRelaxed 6000 150 1.png| Optimal relaxed controls and states determined by an direct approach with ampl_mintoc (Radau collocation) and <math>n_t=6000, \, n_u=40</math>. |
| − | Image: | + | Image:EgerstedtCIA 6000 150 1.png| Optimal binary controls and states determined by an direct approach (Radau collocation) with ampl_mintoc and <math>n_t=6000, \, n_u=40</math>. The relaxed controls were approximated by Combinatorial Integral Approximation. |
</gallery> | </gallery> | ||
| Line 47: | Line 47: | ||
Model descriptions are available in | Model descriptions are available in | ||
| − | |||
| − | |||
* [[:Category:AMPL | AMPL code]] at [[Lotka Volterra fishing problem (AMPL)]] | * [[:Category:AMPL | AMPL code]] at [[Lotka Volterra fishing problem (AMPL)]] | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
== References == | == References == | ||
| Line 79: | Line 58: | ||
[[Category:ODE model]] | [[Category:ODE model]] | ||
[[Category:Tracking objective]] | [[Category:Tracking objective]] | ||
| − | |||
[[Category:Sensitivity-seeking arcs]] | [[Category:Sensitivity-seeking arcs]] | ||
| − | + | ||
Revision as of 15:29, 10 January 2018
| Egerstedt standard problem | |
|---|---|
| State dimension: | 1 |
| Differential states: | 3 |
| Discrete control functions: | 3 |
| Path constraints: | 1 |
| Interior point equalities: | 3 |
The Egerstedt standard problemm is the problem is of an academic nature and was proposed by Egerestedt to highlight the features of an Hybrid System algorithm in 2006 [Egerstedt2006]Author: M. Egerstedt; Y. Wardi; H. Axelsson
Journal: IEEE Transactions on Automatic Control
Pages: 110--115
Title: Transition-time optimization for switched-mode dynamical systems
Volume: 51
Year: 2006 . It has been used since then in many MIOCP research studies (e.g. [Jung2013]Author: M. Jung; C. Kirches; S. Sager
. It has been used since then in many MIOCP research studies (e.g. [Jung2013]Author: M. Jung; C. Kirches; S. Sager
Booktitle: Facets of Combinatorial Optimization -- Festschrift for Martin Gr\"otschel
Editor: M. J\"unger and G. Reinelt
Pages: 387--417
Publisher: Springer Berlin Heidelberg
Title: On Perspective Functions and Vanishing Constraints in Mixed-Integer Nonlinear Optimal Control
Url: http://www.mathopt.de/PUBLICATIONS/Jung2013.pdf
Year: 2013) for benchmarking of MIOCP algorithms.
Mathematical formulation
The mixed-integer optimal control problem after partial outer convexification is given by
![\begin{array}{llclr}
\displaystyle \min_{x, \omega} & x_3(t_f) \\[1.5ex]
\mbox{s.t.}
& \dot{x}_1 & = & -x_1\omega_1 + (x_1+x_2)\omega_2+(x_1-x_2)\omega_3, \\
& \dot{x}_2 & = & (x_1+2x_2)\omega_1+(x_1-2x_2)\omega_2+(x_1+x_2)\omega_3, \\
& \dot{x}_3 & = & x_1^2+x_2^2, \\[1.5ex]
& x(0) &=& (0.5, 0.5, 0)^T, \\
& x_2(t) & \geq & 0.4, \\
& 1 &=& \sum\limits_{i=1}^3\omega_i(t), \\
& \omega(t) &\in& \{0, 1\},
\end{array}](https://mintoc.de/images/math/2/0/8/208ecb2b5782a3106028f82d6458c1ba.png)
for ![t \in [t_0, t_f]=[0,1]](https://mintoc.de/images/math/3/4/e/34e97321e38e35c980a25b5da6ebb7b8.png) .
.
Reference Solutions
If the problem is relaxed, i.e., we demand that  be in the continuous interval
be in the continuous interval ![[0, 1]](https://mintoc.de/images/math/c/c/f/ccfcd347d0bf65dc77afe01a3306a96b.png) instead of the binary choice
instead of the binary choice  , the optimal solution can be determined by using a direct method such as collocation or Bock's direct multiple shooting method.
, the optimal solution can be determined by using a direct method such as collocation or Bock's direct multiple shooting method.
The optimal objective value of the relaxed problem with  is
is  . The objective value of the binary controls obtained by Combinatorial Integral Approimation (CIA) is
. The objective value of the binary controls obtained by Combinatorial Integral Approimation (CIA) is  . The binary control solution was evaluated in the MIOCP by using a Merit function with additional Lagrange term
. The binary control solution was evaluated in the MIOCP by using a Merit function with additional Lagrange term ![100 \max\limits_{t\in[0,1]}\{0,0.4-x_2(t)\}](https://mintoc.de/images/math/0/f/a/0fabc73d7f238f7afc86bde9b0bbf37f.png) .
.
- Reference solution plots
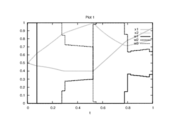
Optimal relaxed controls and states determined by an direct approach with ampl_mintoc (Radau collocation) and
.
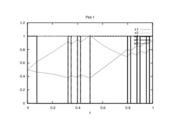
Optimal binary controls and states determined by an direct approach (Radau collocation) with ampl_mintoc and
. The relaxed controls were approximated by Combinatorial Integral Approximation.


Source Code
Model descriptions are available in
References
| [Egerstedt2006] | M. Egerstedt; Y. Wardi; H. Axelsson (2006): Transition-time optimization for switched-mode dynamical systems. IEEE Transactions on Automatic Control, 51, 110--115 | |
| [Jung2013] | M. Jung; C. Kirches; S. Sager (2013): On Perspective Functions and Vanishing Constraints in Mixed-Integer Nonlinear Optimal Control. Facets of Combinatorial Optimization -- Festschrift for Martin Gr\"otschel | |
| [Sager2005] | S. Sager (2005): Numerical methods for mixed--integer optimal control problems. (%edition%). Der andere Verlag, Tönning, Lübeck, Marburg, %pages% | |
| [Sager2006] | S. Sager; H.G. Bock; M. Diehl; G. Reinelt; J.P. Schl\"oder (2009): Numerical methods for optimal control with binary control functions applied to a Lotka-Volterra type fishing problem. Springer, Recent Advances in Optimization | |
We present numerical results for a benchmark MIOCP from a previous study [157] with the addition of switching constraints. In its original form, the problem was:
After partial outer convexification with respect to the integer control v, the binary
convexified counterpart problem reads