Difference between revisions of "Catalyst mixing problem"
From mintOC
ClemensZeile (Talk | contribs) (→Mathematical formulation) |
ClemensZeile (Talk | contribs) |
||
| Line 19: | Line 19: | ||
<math> | <math> | ||
\begin{array}{llcl} | \begin{array}{llcl} | ||
| − | \displaystyle \min_{x, | + | \displaystyle \min_{x, w} &-1 + x_1(t_f) + x_2(t_f) \\[1.5ex] |
\mbox{s.t.} | \mbox{s.t.} | ||
| − | & \dot{x}_1 & = & | + | & \dot{x}_1 & = & w(t) ( 10 x_2(t) - x_1(t)), \\ |
| − | & \dot{x}_2 & = & | + | & \dot{x}_2 & = & w(t) ( x_1(t) - 10 x_2(t)) - (1 - w(t)) \, x_2(t) , \\ |
& x(t_0) &=& (1, 0)^T, \\ | & x(t_0) &=& (1, 0)^T, \\ | ||
| − | & | + | & w(t) &\in& \{0,1\}. |
\end{array} | \end{array} | ||
</math> | </math> | ||
| Line 32: | Line 32: | ||
In this model the parameters used are <math> t_0 = 0, \, \, t_f = 1 </math>. | In this model the parameters used are <math> t_0 = 0, \, \, t_f = 1 </math>. | ||
| + | |||
| + | == Reference Solution == | ||
| + | If the problem is relaxed, i.e., we demand that w(t) be in the continuous interval [0, 1] instead of the binary choice \{0,1\}, the optimal solution can be determined by means of direct optimal control. | ||
| + | |||
| + | <gallery caption="Reference solution plots" widths="180px" heights="140px" perrow="2"> | ||
| + | Image:Catalyst_Mixing_Problem_Performance.png| Results with relaxed controls and collocation from the [http://www.mcs.anl.gov/~more/cops/ COPS library] | ||
| + | Image:Catalyst Mixing Controls.png| Optimal relaxed controls showing a bang-bang structure. | ||
| + | </gallery> | ||
== Source Code == | == Source Code == | ||
Latest revision as of 21:15, 12 January 2018
| Catalyst mixing problem | |
|---|---|
| State dimension: | 1 |
| Differential states: | 2 |
| Continuous control functions: | 1 |
| Path constraints: | 2 |
| Interior point equalities: | 2 |
The Catalyst mixing problem seeks an optimal policy for mixing two catalysts "along the length of a tubular plug ow reactor involving several reactions". (Cite and problem taken from the COPS library)
Mathematical formulation
The problem is given by
![\begin{array}{llcl}
\displaystyle \min_{x, w} &-1 + x_1(t_f) + x_2(t_f) \\[1.5ex]
\mbox{s.t.}
& \dot{x}_1 & = & w(t) ( 10 x_2(t) - x_1(t)), \\
& \dot{x}_2 & = & w(t) ( x_1(t) - 10 x_2(t)) - (1 - w(t)) \, x_2(t) , \\
& x(t_0) &=& (1, 0)^T, \\
& w(t) &\in& \{0,1\}.
\end{array}](https://mintoc.de/images/math/d/5/3/d53aa67777e79cc7de1b69839aa12945.png)
Parameters
In this model the parameters used are  .
.
Reference Solution
If the problem is relaxed, i.e., we demand that w(t) be in the continuous interval [0, 1] instead of the binary choice \{0,1\}, the optimal solution can be determined by means of direct optimal control.
- Reference solution plots

Results with relaxed controls and collocation from the COPS library
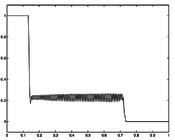
Optimal relaxed controls showing a bang-bang structure.


Source Code
Model descriptions are available in