Bioreactor
The bioreactor problem describes an substrate that is converted to a product by the biomass in the reactor. It has three states and a control that is describing the feed concentration of the substrate. The problem is taken from the examples folder of the ACADO toolkit described in:
Houska, Boris, Hans Joachim Ferreau, and Moritz Diehl. "ACADO toolkit—An open‐source framework for automatic control and dynamic optimization." Optimal Control Applications and Methods 32.3 (2011): 298-312.
Originally the problem seems to be motivated by:
VERSYCK, KARINA J., and JAN F. VAN IMPE. "Feed rate optimization for fed-batch bioreactors: From optimal process performance to optimal parameter estimation." Chemical Engineering Communications 172.1 (1999): 107-124.
Contents
Model Formulation
The dynamic model is an ODE model:
The three states describe the concentration of the biomass ( ), the substrate (
), the substrate ( ), and the product (
), and the product ( ) in the reactor. In steady state the feed and outlet are equal and dilute all three concentrations with a ratio
) in the reactor. In steady state the feed and outlet are equal and dilute all three concentrations with a ratio  . The biomass grows with a rate
. The biomass grows with a rate
 , while it eats up the substrate with the rate
, while it eats up the substrate with the rate  and produces product at a rate
and produces product at a rate  . The rate is given by:
. The rate is given by:

The fixed parameters (constants) of the model are as follows.
| Name | Symbol | Value | Unit |
| Dilution |
|
0.15 | [-] |
| Rate coefficient | 
|
22 | [-] |
| Rate coefficient | 
|
1.2 | [-] |
| Rate coefficient | 
|
50 | [-] |
| Substrate to Biomass rate | 
|
0.4 | [-] |
| Linear slope | 
|
2.2 | [-] |
| Linear intercept | 
|
0.2 | [-] |
| Maximal growth rate | 
|
0.48 | [-] |
Optimal Control Problem
Writing shortly for the states in vector notation  the OCP reads:
the OCP reads:
![\begin{array}{cl}
\displaystyle \min_{x,S_f} & J(x,S_f)\\[1.5ex]
\mbox{s.t.} & \dot{x} = f(x,S_f), \forall \, t \in [0,48]\\
& x(0) = (6.5,12,22)^T \\
& x \in \R^3,\,S_f \in [28.7,40].
\end{array}](https://mintoc.de/images/math/8/f/a/8faa15c9069ea63b2a4359012e47ea77.png)
Objective

Reference Solution
Here we present the reference solution of the reimplemented example in the ACADO code generation with matlab. The source code is given in the next section.
- Reference solution
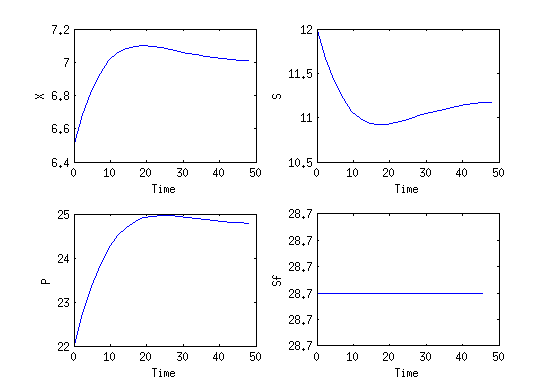
Optimal solution for the ACADO example.

Source Code
This is the implementation of the ACADO bioreactor example with the matlab interface and the code generation of ACADO.
% implements the bioreactor example of ACADO for the matlab interface and
% the code generation
clc;
clear all;
close all;
Ts = 0.1;
EXPORT = 1;
%% Variables
DifferentialState X S P;
Control Sf;
n_XD = length(diffStates);
n_U = length(controls);
%% Constants
D = 0.15;
Ki = 22.0;
Km = 1.2 ;
Pm = 50.0;
Yxs = 0.4 ;
alpha = 2.2 ;
beta = 0.2 ;
mum = 0.48;
Sfmin = 28.7;
Sfmax = 40.0;
t_start = 0.0;
t_end = 48.0;
N = 20;
%% Differential Equation
mu = mum*(1-P/Pm)*S/(Km+S+S^2/Ki);
f = dot([X;S;P]) == [-D*X+mu*X;...
D*(Sf-S)-(mu/Yxs)*X;...
-D*P+(alpha*mu+beta)*X];
% output
h = P-Sf;
hN = P;
%% MPCexport
acadoSet('problemname', 'mpc');
ocp = acado.OCP( t_start, t_end, N );
W_mat = D;
WN_mat = D;
W = acado.BMatrix(W_mat);
WN = acado.BMatrix(WN_mat);
ocp.minimizeLSQ( W, h );
ocp.minimizeLSQEndTerm( WN, hN );
ocp.subjectTo( Sfmin <= Sf <= Sfmax );
ocp.setModel(f);
mpc = acado.OCPexport( ocp );
mpc.set( 'HESSIAN_APPROXIMATION', 'GAUSS_NEWTON' );
mpc.set( 'DISCRETIZATION_TYPE', 'MULTIPLE_SHOOTING' );
mpc.set( 'SPARSE_QP_SOLUTION', 'FULL_CONDENSING_N2');
mpc.set( 'INTEGRATOR_TYPE', 'INT_IRK_GL4' );
mpc.set( 'NUM_INTEGRATOR_STEPS', 10*N );
mpc.set( 'QP_SOLVER', 'QP_QPOASES' );
mpc.set( 'HOTSTART_QP', 'NO' );
mpc.set( 'LEVENBERG_MARQUARDT', 1e-10 );
if EXPORT
mpc.exportCode( 'export_MPC' );
copyfile('../../../../../../external_packages/qpoases', 'export_MPC/qpoases')
cd export_MPC
make_acado_solver('../acado_MPCstep')
cd ..
end
%% CONSTANTS FOR OPTIMIZATION
X0 = [6.5 12.0 22.0];
input.x0=X0';
Xref = [0 0 0];
input.x = repmat(Xref,N+1,1);
Xref = repmat(Xref,N,1);
input.od = [];
Uref = zeros(N,n_U);
input.u = Uref;
input.y = Sfmin*ones(N,1);
input.yN = Sfmin;
input.W = 1;
input.WN = 1;
%% SOLVER LOOP (SQP - Gauss newton)
display('------------------------------------------------------------------')
display(' SOLVER Loop' )
display('------------------------------------------------------------------')
for i=1:20
tic
% Solve NMPC OCP
output = acado_MPCstep(input);
input.x=output.x;
input.u=output.u;
disp([' (RTI step: ' num2str(output.info.cpuTime*1e6) ' µs)'])
end
%% PLOT RESULTS
% States
figure(1)
plot([t_start:t_end/N:t_end],output.x)
ylabel('States')
xlabel('Time')
legend('X','S','P')
% Control
figure(2)
plot([t_start:t_end/N:t_end-t_end/N],output.u)
ylabel('Control (Sf)')
xlabel('Time')
% one figure for all
figure(3)
subplot(2,2,1)
plot([t_start:t_end/N:t_end],output.x(:,1))
ylabel('X')
xlabel('Time')
subplot(2,2,2)
plot([t_start:t_end/N:t_end],output.x(:,2))
ylabel('S')
xlabel('Time')
subplot(2,2,3)
plot([t_start:t_end/N:t_end],output.x(:,3))
ylabel('P')
xlabel('Time')
subplot(2,2,4)
plot([t_start:t_end/N:t_end-t_end/N],output.u)
ylabel('Sf')
xlabel('Time')