Difference between revisions of "Double Tank multimode problem"
ClemensZeile (Talk | contribs) (Created page with "{{Dimensions |nd = 1 |nx = 3 |nw = 3 |nre = 2 }}<!-- Do not insert line break here or Dimensions Box moves up in the layout... -->This site describ...") |
ClemensZeile (Talk | contribs) |
||
| (3 intermediate revisions by the same user not shown) | |||
| Line 1: | Line 1: | ||
{{Dimensions | {{Dimensions | ||
|nd = 1 | |nd = 1 | ||
| − | |nx = | + | |nx = 2 |
|nw = 3 | |nw = 3 | ||
|nre = 2 | |nre = 2 | ||
| Line 23: | Line 23: | ||
</math> | </math> | ||
| − | |||
| − | |||
== Parameters == | == Parameters == | ||
| Line 30: | Line 28: | ||
These fixed values are used within the model. | These fixed values are used within the model. | ||
| − | <math> | + | <math> T=10, c_1=1, c_2=0.5, c_3=2, k_1=2, k_2=3. </math> |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | </math> | + | |
== Reference Solutions == | == Reference Solutions == | ||
| Line 43: | Line 34: | ||
If the problem is relaxed, i.e., we demand that <math>w(t)</math> be in the continuous interval <math>[0, 1]</math> instead of the binary choice <math>\{0,1\}</math>, the optimal solution can be determined by means of direct optimal control. | If the problem is relaxed, i.e., we demand that <math>w(t)</math> be in the continuous interval <math>[0, 1]</math> instead of the binary choice <math>\{0,1\}</math>, the optimal solution can be determined by means of direct optimal control. | ||
| − | The optimal objective value of the relaxed problem with <math> n_t=12000, \, n_u= | + | The optimal objective value of the relaxed problem with <math> n_t=12000, \, n_u=100 </math> is <math>2.59106823</math>. The objective value of the binary controls obtained by Combinatorial Integral Approimation (CIA) is <math>2.59121008</math>. |
<gallery caption="Reference solution plots" widths="180px" heights="140px" perrow="2"> | <gallery caption="Reference solution plots" widths="180px" heights="140px" perrow="2"> | ||
| − | Image: | + | Image:MmdoubletankRelaxed 12000 120 1.png| Optimal relaxed controls and states determined by an direct approach with ampl_mintoc (Radau collocation) and <math>n_t=12000, \, n_u=100</math>. |
| − | Image: | + | Image:MmdoubletankCIA_12000_120_1.png| Optimal binary controls and states determined by an direct approach (Radau collocation) with ampl_mintoc and <math>n_t=12000, \, n_u=100</math>. The relaxed controls were approximated by Combinatorial Integral Approximation. |
</gallery> | </gallery> | ||
| + | == Source Code == | ||
| + | Model description is available in | ||
| + | * [[:Category:AMPL | AMPL code]] at [[Double Tank multimode problem (AMPL)]] | ||
| Line 63: | Line 57: | ||
[[Category:Chattering]] | [[Category:Chattering]] | ||
[[Category:Sensitivity-seeking arcs]] | [[Category:Sensitivity-seeking arcs]] | ||
| − | + | ||
Latest revision as of 09:37, 14 March 2020
| Double Tank multimode problem | |
|---|---|
| State dimension: | 1 |
| Differential states: | 2 |
| Discrete control functions: | 3 |
| Interior point equalities: | 2 |
This site describes a Double tank problem variant with three binary controls instead of only one control.
Mathematical formulation
The mixed-integer optimal control problem is given by
![\begin{array}{llll}
\displaystyle \min_{x,w} & \displaystyle \int_{0}^{T} & k_1(x_2-k_2)^2 \; \text{d}t\\[1.5ex]
\mbox{s.t.} & \dot{x}_1 & = \sum\limits_{i=1}^{3} c_{i}\; w_i,-\sqrt{x_1}, \\[1.5ex]
& \dot{x}_2 & = \sqrt{x_1}-\sqrt{x_2}, \\[1.5ex]
& x(0) & = (2,2)^T, \\[1.5ex]
& 1 & = \sum\limits_{i=1}^{3}w_i(t), \\
& w_i(t) &\in \{0, 1\}, \quad i=1\ldots 3.
\end{array}](https://mintoc.de/images/math/9/3/4/934bdefc176997c3211fb2e62ee08e8c.png)
Parameters
These fixed values are used within the model.

Reference Solutions
If the problem is relaxed, i.e., we demand that  be in the continuous interval
be in the continuous interval ![[0, 1]](https://mintoc.de/images/math/c/c/f/ccfcd347d0bf65dc77afe01a3306a96b.png) instead of the binary choice
instead of the binary choice  , the optimal solution can be determined by means of direct optimal control.
, the optimal solution can be determined by means of direct optimal control.
The optimal objective value of the relaxed problem with  is
is  . The objective value of the binary controls obtained by Combinatorial Integral Approimation (CIA) is
. The objective value of the binary controls obtained by Combinatorial Integral Approimation (CIA) is  .
.
- Reference solution plots
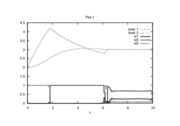
Optimal relaxed controls and states determined by an direct approach with ampl_mintoc (Radau collocation) and
.
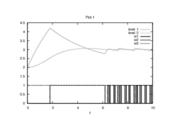
Optimal binary controls and states determined by an direct approach (Radau collocation) with ampl_mintoc and
. The relaxed controls were approximated by Combinatorial Integral Approximation.


Source Code
Model description is available in