Double Tank multimode problem
| Double Tank multimode problem | |
|---|---|
| State dimension: | 1 |
| Differential states: | 2 |
| Discrete control functions: | 3 |
| Interior point equalities: | 2 |
This site describes a Double tank problem variant with three binary controls instead of only one control.
Mathematical formulation
The mixed-integer optimal control problem is given by
![\begin{array}{llll}
\displaystyle \min_{x,w} & \displaystyle \int_{0}^{T} & k_1(x_2-k_2)^2 \; \text{d}t\\[1.5ex]
\mbox{s.t.} & \dot{x}_1 & = \sum\limits_{i=1}^{3} c_{i}\; w_i,-\sqrt{x_1}, \\[1.5ex]
& \dot{x}_2 & = \sqrt{x_1}-\sqrt{x_2}, \\[1.5ex]
& x(0) & = (2,2)^T, \\[1.5ex]
& 1 & = \sum\limits_{i=1}^{3}w_i(t), \\
& w_i(t) &\in \{0, 1\}, \quad i=1\ldots 3.
\end{array}](https://mintoc.de/images/math/9/3/4/934bdefc176997c3211fb2e62ee08e8c.png)
Parameters
These fixed values are used within the model.

Reference Solutions
If the problem is relaxed, i.e., we demand that  be in the continuous interval
be in the continuous interval ![[0, 1]](https://mintoc.de/images/math/c/c/f/ccfcd347d0bf65dc77afe01a3306a96b.png) instead of the binary choice
instead of the binary choice  , the optimal solution can be determined by means of direct optimal control.
, the optimal solution can be determined by means of direct optimal control.
The optimal objective value of the relaxed problem with  is
is  . The objective value of the binary controls obtained by Combinatorial Integral Approimation (CIA) is
. The objective value of the binary controls obtained by Combinatorial Integral Approimation (CIA) is  .
.
- Reference solution plots
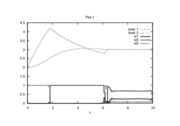
Optimal relaxed controls and states determined by an direct approach with ampl_mintoc (Radau collocation) and
.
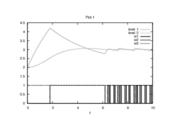
Optimal binary controls and states determined by an direct approach (Radau collocation) with ampl_mintoc and
. The relaxed controls were approximated by Combinatorial Integral Approximation.


Source Code
Model description is available in