Difference between revisions of "F-8 aircraft"
m |
JonasSchulze (Talk | contribs) m (Text replacement - "<bibreferences/>" to "<biblist />") |
||
| Line 129: | Line 129: | ||
== References == | == References == | ||
| − | < | + | <biblist /> |
<!--List of all categories this page is part of. List characterization of solution behavior, model properties, ore presence of implementation details (e.g., AMPL for AMPL model) here --> | <!--List of all categories this page is part of. List characterization of solution behavior, model properties, ore presence of implementation details (e.g., AMPL for AMPL model) here --> | ||
Revision as of 22:28, 30 December 2015
| F-8 aircraft | |
|---|---|
| State dimension: | 1 |
| Differential states: | 3 |
| Discrete control functions: | 1 |
| Interior point equalities: | 6 |
The F-8 aircraft control problem is based on a very simple aircraft model. The control problem was introduced by Kaya and Noakes and aims at controlling an aircraft in a time-optimal way from an initial state to a terminal state.
The mathematical equations form a small-scale ODE model. The interior point equality conditions fix both initial and terminal values of the differential states.
The optimal, relaxed control function shows bang bang behavior. The problem is furthermore interesting as it should be reformulated equivalently.
Contents
[hide]Mathematical formulation
For ![t \in [0, T]](https://mintoc.de/images/math/e/6/6/e66a2b7fedcba80ccb192b87440f8d9c.png) almost everywhere the mixed-integer optimal control problem is given by
almost everywhere the mixed-integer optimal control problem is given by
![\begin{array}{llcl}
\displaystyle \min_{x, w, T} & T \\[1.5ex]
\mbox{s.t.} & \dot{x}_0 &=& -0.877 \; x_0 + x_2 - 0.088 \; x_0 \; x_2 + 0.47 \; x_0^2 - 0.019 \; x_1^2 - x_0^2 \; x_2 + 3.846 \; x_0^3 \\
&&& - 0.215 \; w + 0.28 \; x_0^2 \; w + 0.47 \; x_0 \; w^2 + 0.63 \; w^3 \\
& \dot{x}_1 &=& x_2 \\
& \dot{x}_2 &=& -4.208 \; x_0 - 0.396 \; x_2 - 0.47 \; x_0^2 - 3.564 \; x_0^3 \\
&&& - 20.967 \; w + 6.265 \; x_0^2 \; w + 46 \; x_0 \; w^2 + 61.4 \; w^3 \\
& x(0) &=& (0.4655,0,0)^T, \\
& x(T) &=& (0,0,0)^T, \\
& w(t) &\in& \{-0.05236,0.05236\}.
\end{array}](https://mintoc.de/images/math/d/2/b/d2bd7e6d1cc8affb72d59248a105d528.png)
 is the angle of attack in radians,
is the angle of attack in radians,  is the pitch angle,
is the pitch angle,  is the pitch rate in rad/s, and the control function
is the pitch rate in rad/s, and the control function  is the tail deflection angle in radians. This model goes back to Garrard<bibref>Garrard1977</bibref>.
is the tail deflection angle in radians. This model goes back to Garrard<bibref>Garrard1977</bibref>.
In the control problem, both initial and terminal values of the differential states are fixed.
Reformulation
The control w(t) is restricted to take values from a finite set only. Hence, the control problem can be reformulated equivalently to
![\begin{array}{llcl}
\displaystyle \min_{x, w, T} & T \\[1.5ex]
\mbox{s.t.} & \dot{x}_0 &=& -0.877 \; x_0 + x_2 - 0.088 \; x_0 \; x_2 + 0.47 \; x_0^2 - 0.019 \; x_1^2 - x_0^2 \; x_2 + 3.846 \; x_0^3 \\
&&& - \left( 0.215 \; \xi - 0.28 \; x_0^2 \; \xi - 0.47 \; x_0 \; \xi^2 - 0.63 \; \xi^3 \right) \; w \\
&&& - \left( - 0.215 \; \xi + 0.28 \; x_0^2 \; \xi - 0.47 \; x_0 \; \xi^2 + 0.63 \; \xi^3 \right) \; (1 - w) \\
& &=& -0.877 \; x_0 + x_2 - 0.088 \; x_0 \; x_2 + 0.47 \; x_0^2 - 0.019 \; x_1^2 - x_0^2 \; x_2 + 3.846 \; x_0^3 \\
&&& + 0.215 \; \xi - 0.28 \; x_0^2 \; \xi + 0.47 \; x_0 \; \xi^2 - 0.63 \; \xi^3 \\
&&& - \left( 0.215 \; \xi - 0.28 \; x_0^2 \; \xi - 0.63 \; \xi^3 \right) \; 2 w \\
& \dot{x}_1 &=& x_2 \\
& \dot{x}_2 &=& -4.208 \; x_0 - 0.396 \; x_2 - 0.47 \; x_0^2 - 3.564 \; x_0^3 \\
&&& - \left( 20.967 \; \xi - 6.265 \; x_0^2 \; \xi -46 \; x_0 \; \xi^2 - 61.4 \; \xi^3 \right) \; w \\
&&& - \left( - 20.967 \; \xi + 6.265 \; x_0^2 \; \xi -46 \; x_0 \; \xi^2 + 61.4 \; \xi^3 \right) \; (1 - w) \\
& &=& -4.208 \; x_0 - 0.396 \; x_2 - 0.47 \; x_0^2 - 3.564 \; x_0^3 \\
&&& + 20.967 \; \xi - 6.265 \; x_0^2 \; \xi + 46 \; x_0 \; \xi^2 - 61.4 \; \xi^3 \\
&&& - \left( 20.967 \; \xi - 6.265 \; x_0^2 \; \xi - 61.4 \; \xi^3 \right) \; 2 w \\
& x(0) &=& (0.4655,0,0)^T, \\
& x(T) &=& (0,0,0)^T, \\
& w(t) &\in& \{0,1\},
\end{array}](https://mintoc.de/images/math/0/4/a/04a0e56e2d185c764c658785ce00ade8.png)
with  . Note that there is a bijection between optimal solutions of the two problems.
. Note that there is a bijection between optimal solutions of the two problems.
Reference solutions
We provide here a comparison of different solutions reported in the literature. The numbers show the respective lengths  of the switching arcs with the value of
of the switching arcs with the value of  on the upper or lower bound (given in the second column). Claim denotes what is stated in the respective publication, Simulation shows values obtained by a simulation with a Runge-Kutta-Fehlberg method of 4th/5th order and an integration tolerance of
on the upper or lower bound (given in the second column). Claim denotes what is stated in the respective publication, Simulation shows values obtained by a simulation with a Runge-Kutta-Fehlberg method of 4th/5th order and an integration tolerance of  .
.
| Arc | w(t) | Lee et al.<bibref>Lee1997a</bibref> | Kaya<bibref>Kaya2003</bibref> | Sager<bibref>Sager2005</bibref> | Schlueter/ Gerdts | Sager |
|---|---|---|---|---|---|---|
| 1 | 1 | 0.00000 | 0.10292 | 0.10235 | 0.0 | 1.13492 |
| 2 | 0 | 2.18800 | 1.92793 | 1.92812 | 0.608750 | 0.34703 |
| 3 | 1 | 0.16400 | 0.16687 | 0.16645 | 3.136514 | 1.60721 |
| 4 | 0 | 2.88100 | 2.74338 | 2.73071 | 0.654550 | 0.69169 |
| 5 | 1 | 0.33000 | 0.32992 | 0.32994 | 0.0 | 0.0 |
| 6 | 0 | 0.47200 | 0.47116 | 0.47107 | 0.0 | 0.0 |
| Claim: Infeasibility | - | 1.00E-10 | 7.30E-06 | 5.90E-06 | 3.29169e-06 | 2.21723e-07 |
| Claim: Objective | - | 6.03500 | 5.74217 | 5.72864 | 4.39981 | 3.78086 |
| Simulation: Infeasibility | - | 1.75E-03 | 1.64E-03 | 5.90E-06 | 3.29169e-06 | 2.21723e-07 |
| Simulation: Objective | - | 6.03500 | 5.74218 | 5.72864 | 4.39981 | 3.78086 |
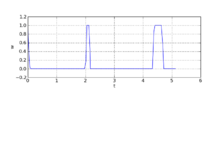
The best known optimal objective value of this problem given is given by  . The corresponding solution is shown in the rightmost plot. The solution of bang-bang type switches three times, starting with
. The corresponding solution is shown in the rightmost plot. The solution of bang-bang type switches three times, starting with  .
.
- Reference solution plots
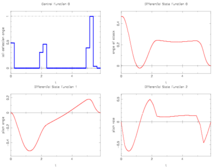
Locally optimal relaxed control on a coarse control discretization grid and corresponding differential states.
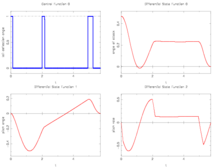
Locally optimal relaxed control on a fine, adaptively chosen control discretization grid and corresponding differential states.
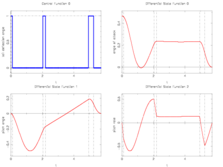
Integer control and corresponding differential states from Sager<bibref>Sager2005</bibref>.
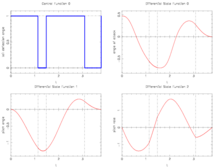
Best known integer control and corresponding differential states from Sager solution.





Optimica
Objective : 5.12799232 infeasibility : 6.2235588037251599e-10
- Obtained solution plots
(Probably sub-)Optimal control.
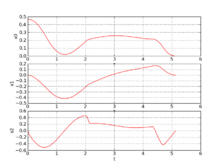
Corresponding differential states.


Source Code
Model descriptions are available in
Variants
- a prescribed time grid for the control function, see F-8 aircraft (AMPL),
Miscellaneous and Further Reading
See <bibref>Kaya2003</bibref> and <bibref>Sager2005</bibref> for details.
References
There were no citations found in the article.